
运用FPGA完成一个直流有刷电机操控器
来源:极速体育在线直播吧 发布时间:2024-01-30 18:09:46 浏览数:181 次
操控中,习气将其称为环,即速度环 和 视点环(方位环))。因而这是一个闭环体系,需求得到体系的反应,实时得到
在做规划之前,最好先将功用清晰下来,然后制作简略的流程框图,当然这儿先将程序完成完了之后,再制作的流程框图 ̄□ ̄||,框图如下,主要由三大模块组成(操控姿势就不包含在里边了),视点、速度和PID模块,下面将逐个介绍各个模块的详细细节。
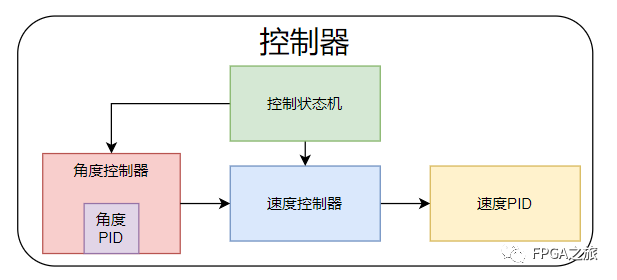
PID的原理在之前的文章中有提到过,就不再持续提起了,本次完成的方法方法和之前完成的方法相同,将PID系数扩展100倍取整,然后相乘,将得到的成果再右移7位 加快 右移 9位,约等于除以了100。
速度操控器里边主要做希望速度的输出和电机运动方向切换的操控。希望速度主要由外部输入和方向切换来操控,假如说有必要进行方向切换的话,为维护电机,不能立马进行电机的转向,而要等候速度降低到安全速度后,再进行方向切换。
假如需求转向的线,待速度降低到安全速度后,例如5RPM,就切换方向 和 将希望速度设置为外部设置的速度。
操控进程和速度操控进程相同,将当时视点值和希望视点值输入视点PID进行核算,然后将核算后的成果输入到速度PID进行核算,得到PWM的改变值。
这一操控回路是最简略的,假如说需求在视点旋转的时分,还需求对速度来操控的话,就会杂乱一点点(串级),等后边有需求了再进行完成。
本次完成的操控器 和 前次完成的 编码器,一起组成了一个简略的电机操控器,可用于对电机的速度 和 视点进行操控。
top层的操控信号如下,在速度形式下,只需求设置rmp的值,电机就能够直接进行滚动,而在视点形式下,需求先设置旋转的视点值,然后在使能视点旋转,电机就会旋转对应的视点后,中止。

